







قانون دست چپ، قانون دست راست، قانون پیچ دست راست.قانون سمت چپ، این مبنایی برای تجزیه و تحلیل نیروی چرخش موتور است.به زبان ساده، این هادی حامل جریان در میدان مغناطیسی است که تحت تأثیر نیرو قرار می گیرد.
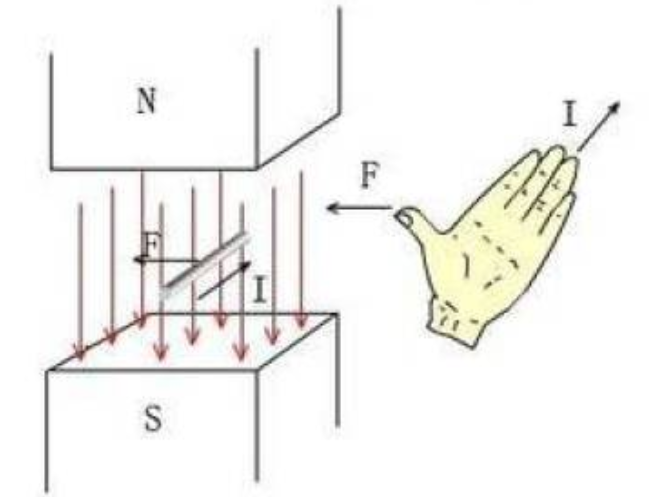
اجازه دهید خط میدان مغناطیسی از جلوی کف دست عبور کند، جهت انگشتان جهت جریان و جهت شست جهت نیروی مغناطیسی است.کشش نیرو خطوط میدان مغناطیسی را قطع می کند تا نیروی الکتروموتور تولید کند.
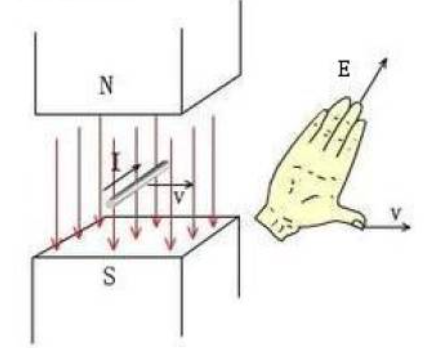
اجازه دهید خط میدان مغناطیسی از کف دست عبور کند، جهت شست جهت حرکت است و جهت انگشت جهت نیروی الکتروموتور ایجاد شده است.چرا از نیروی الکتروموتور القایی صحبت می کنیم؟نمی دانم شما هم تجربه مشابهی دارید یا نه.وقتی سیم های سه فاز موتور را با هم ترکیب کنید و موتور را با دست بچرخانید، متوجه می شوید که مقاومت بسیار زیاد است.این به این دلیل است که القاء در طول چرخش موتور رخ می دهد.نیروی الکتروموتور جریان تولید می کند و جریانی که از طریق هادی در میدان مغناطیسی می گذرد نیرویی مخالف جهت چرخش ایجاد می کند و همه احساس می کنند که مقاومت زیادی در برابر چرخش وجود دارد.
سیم های سه فاز جدا شده و موتور به راحتی قابل چرخش است
خطوط سه فاز ترکیب شده اند و مقاومت موتور بسیار زیاد است.طبق قانون پیچ دست راست، شیر برقی برق دار را با دست راست نگه دارید، به طوری که چهار انگشت در همان جهت جریان خم شوند، سپس انتهایی که انگشت شست به آن اشاره می کند، قطب N شیر برقی برق دار است.
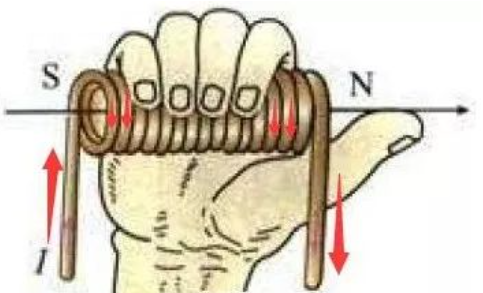
این قانون مبنای قضاوت در مورد قطبیت سیم پیچ برق دار است و جهت فلش قرمز جهت جریان است.پس از خواندن این سه قانون، اجازه دهید نگاهی به اصول اولیه چرخش موتور بیندازیم.بخش اول: مدل موتور DC ما مدلی از یک موتور DC را پیدا می کنیم که در فیزیک دبیرستان مورد مطالعه قرار گرفته است و یک تحلیل ساده از طریق روش تحلیل مدار مغناطیسی انجام می دهیم.
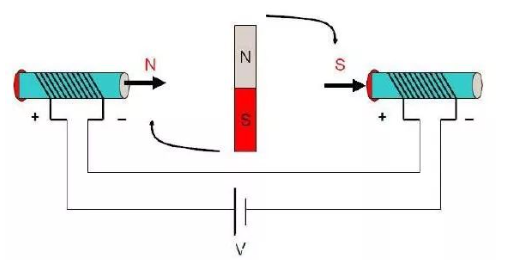
حالت 1 هنگامی که جریان به سیم پیچ ها در هر دو انتها اعمال می شود، طبق قانون پیچ سمت راست، شدت القای مغناطیسی اعمال شده B (همانطور که با فلش ضخیم نشان داده شده است) ایجاد می شود و روتور در وسط سعی می کند ایجاد کند. جهت خط القاء مغناطیسی داخلی آن تا حد امکان.جهت خط میدان مغناطیسی بیرونی برای تشکیل کوتاهترین حلقه خط میدان مغناطیسی بسته سازگار است، به طوری که روتور داخلی در جهت عقربه های ساعت بچرخد.هنگامی که جهت میدان مغناطیسی روتور بر جهت میدان مغناطیسی خارجی عمود باشد، گشتاور دورانی روتور بزرگترین است.توجه داشته باشید که گفته می شود "لحظه" بزرگترین است، نه "نیرو".درست است که وقتی میدان مغناطیسی روتور هم جهت میدان مغناطیسی خارجی باشد، نیروی مغناطیسی روی روتور بزرگترین است، اما در این زمان روتور در حالت افقی و بازوی نیرو 0 است و البته نمی چرخدبرای اضافه کردن، لحظه حاصل ضرب نیرو و بازوی نیرو است.اگر یکی از آنها صفر باشد، حاصل صفر است.هنگامی که روتور به حالت افقی می چرخد، اگرچه دیگر تحت تأثیر گشتاور دورانی قرار نمی گیرد، به دلیل اینرسی به چرخش در جهت عقربه های ساعت ادامه می دهد.در این زمان اگر جهت جریان دو شیر برقی مطابق شکل زیر تغییر کند، روتور به چرخش خود ادامه می دهد.در جهت عقربه های ساعت به جلو بچرخید،
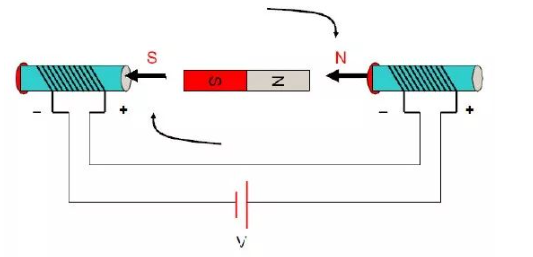
در حالت 2، جهت جریان دو شیر برقی دائما تغییر می کند و روتور داخلی به چرخش خود ادامه می دهد.این عمل تغییر جهت جریان را کموتاسیون می گویند.نکته جانبی: زمان کموت کردن فقط به موقعیت روتور مربوط می شود و مستقیماً به کمیت دیگری مربوط نمی شود.قسمت 2: موتور روتور داخلی دو قطبی سه فاز به طور کلی، سیمپیچهای سه فاز استاتور دارای حالت اتصال ستاره و حالت اتصال مثلث هستند و "حالت هدایت دو یا دو اتصال ستاره سه فاز" رایجترین حالت است. استفاده می شود که در اینجا استفاده می شود.این مدل برای یک تحلیل ساده استفاده می شود.
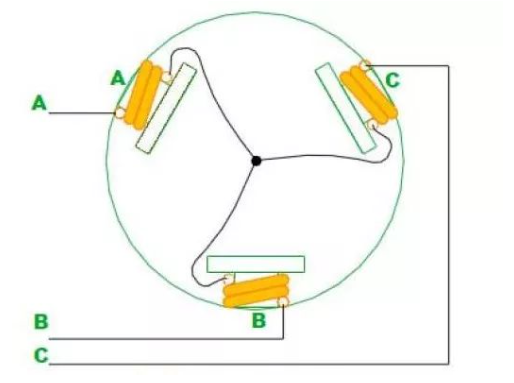
شکل بالا نحوه اتصال سیم پیچ های استاتور را نشان می دهد (روتور به عنوان یک آهنربای دو قطبی فرضی نشان داده نمی شود)، و سه سیم پیچ به شکل "Y" از طریق نقطه اتصال مرکزی به یکدیگر متصل شده اند.کل موتور به سه سیم A, B, C منتهی می شود. وقتی دو به دو برق می زنند، 6 مورد وجود دارد، یعنی AB، AC، BC، BA، CA، CB.توجه داشته باشید که این به ترتیب است.
اکنون به مرحله اول نگاه می کنم: فاز AB انرژی می گیرد
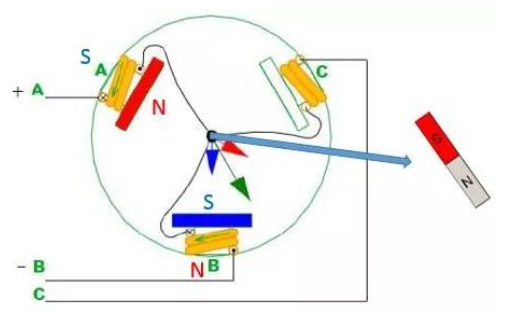
هنگامی که فاز AB فعال می شود، جهت خط میدان مغناطیسی تولید شده توسط سیم پیچ قطب A با فلش قرمز نشان داده می شود و جهت خط میدان مغناطیسی تولید شده توسط قطب B با فلش آبی نشان داده می شود، سپس جهت نشان داده می شود. نیروی حاصل با فلش سبز نشان داده می شود، سپس با فرض وجود یک آهنربای دو قطبی، جهت قطب N با جهت نشان داده شده توسط فلش سبز مطابق با "روتور در وسط تلاش می کند تا جهت خطوط میدان مغناطیسی داخلی آن مطابق با جهت خطوط میدان مغناطیسی خارجی است.در مورد C، او فعلاً با او کاری ندارد.
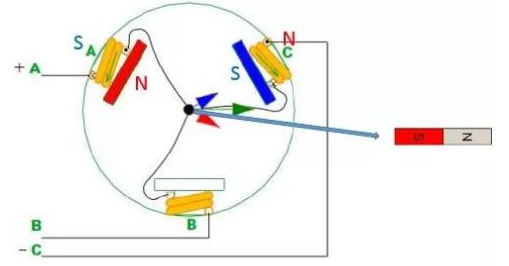
مرحله 2: فاز AC با انرژی
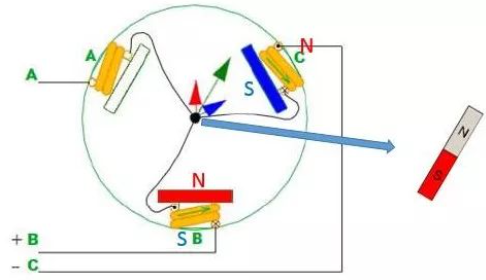
مرحله سوم: الکتریسیته شدن فاز BC
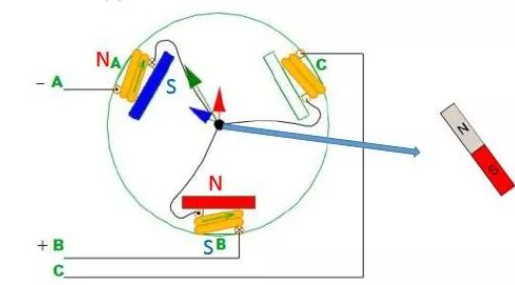
مرحله سوم: فاز BA انرژی می گیرد
شکل زیر نمودار وضعیت آهنربای میانی (روتور) است: هر روتور فرآیندی 60 درجه می چرخد.

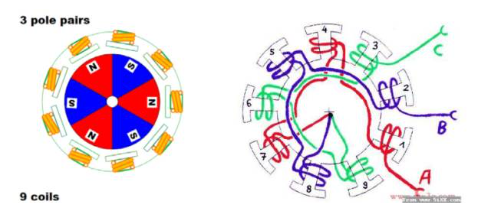
چرخش کامل در شش فرآیند تکمیل می شود که از این تعداد شش تغییر انجام می شود.بخش سوم: موتور روتور داخلی چند قطبی سه فاز چند سیم پیچ بیایید به یک نکته پیچیده تر نگاه کنیم.شکل (الف) یک موتور سه فاز نه سیم پیچ شش قطبی (سه فاز، نه سیم پیچ، شش قطبی) است.موتور روتور داخلی قطب مخالف، اتصال سیم پیچ آن در شکل (ب) نشان داده شده است.از شکل (ب) می توان دریافت که سیم پیچ های سه فاز نیز در نقطه میانی به هم متصل شده اند که آن هم یک اتصال ستاره ای است.به طور کلی، تعداد سیمپیچهای موتور با تعداد قطبهای آهنربای دائمی مغایرت دارد (مثلاً به جای 6 سیمپیچ و 6 قطب از 9 سیمپیچ و 6 قطب استفاده میشود)، تا از دندانههای استاتور و آهنرباهای روتور از جذب و تراز کردن.
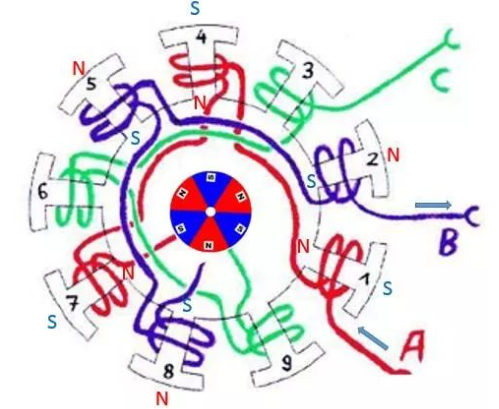
اصل حرکت آن به این صورت است: قطب N روتور و قطب S سیم پیچ پرانرژی تمایل به تراز دارند و قطب S روتور و قطب N سیم پیچ پرانرژی شده تمایل به هم تراز شدن دارند.یعنی S و N یکدیگر را جذب می کنند.توجه داشته باشید که با روش تحلیل قبلی متفاوت است.خوب، بیایید به شما کمک کنیم دوباره آن را تجزیه و تحلیل کنید.مرحله اول: فاز AB برق دار می شود
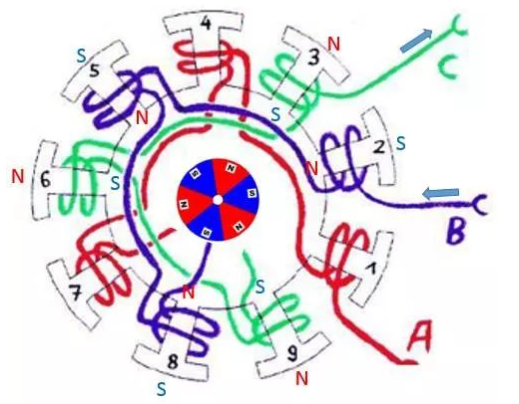
مرحله 2: فاز AC با انرژی

مرحله سوم: الکتریسیته شدن فاز BC
زمان ارسال: اکتبر-21-2022